What is mobile mapping?
Mobile mapping is a method of mapping using a data collection system and a moving vehicle, mostly a car or van. It is the process of collecting spatial data using mobile platforms equipped with a combination of sensors such as GNSS receiver, an inertial navigation system (INS), cameras, LiDAR system and other technologies. These systems are mounted on vehicles, drones, or handheld devices, thus capturing of detailed and accurate data from various environments.
According to inertiallabs.com, in mobile mapping, as in aerial mapping using unmanned aerial vehicles or drones, accuracy is important consideration. The accuracy of each component of the data collection system will ultimately affect the accuracy of the outputs such as raw data and maps. To improve overall accuracy and reliability, the GNSS is integrated with other sensors such as Inertial Measurement Units (IMUs), LiDAR and visual odometry.
Components of Mobile Mapping System
1. Positioning System – GNSS
GNSS technology is a collection of satellite positioning systems (i.e. the GPS – US, GLONASS – Russia, Galileo – EU and BeiDou – China) with a global coverage. GNSS provides positioning, navigation, and timing services. In mobile mapping, the positioning data is essential for georeferencing captured imagery, LiDAR and other sensor data allowing for the creation of highly accurate maps and 3D models of the project area.
GNSS consists of many satellites that orbit the Earth in fixed orbits. Each satellite constantly transmits radio signals containing information about the time of departure of the signal and the orbital position of the satellite. Using data from multiple satellites in space, the receiver can pinpoint its location by three coordinates (latitude, longitude, altitude) and time via Trilateration technique.
2. Positioning System – INS
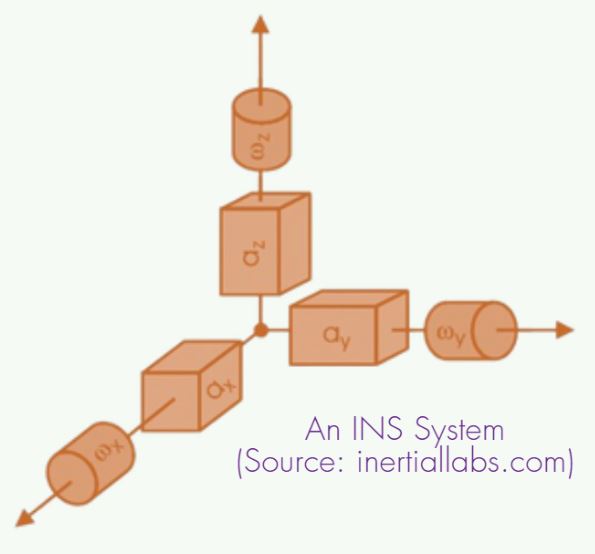
An Inertial Navigation System (INS) is a device that uses Gyroscopes and Accelerometers (main components that make up an Inertial measurement Unit – IMU). The Magnetometers are to determine the orientation angles, position, and velocity of an object without external data sources. In mobile mapping, INS used to determine the position, orientation and velocity of a moving object without relying on external references like GPS. By continuously tracking changes in velocity and orientation, an INS can calculate the position of the object through dead reckoning. This makes it particularly useful in environments where external signals, such as GNSS, are unreliable or unavailable, like in tunnels, dense urban areas, or underwater.
3. Positioning System – SLAM
The Simultaneous Localization And Mapping (SLAM) is a modern technology that allows autonomous systems to simultaneously build a map of an unknown environment and then determines their location in that environment. SLAM uses various types of sensors including LiDAR systems, cameras or ultrasonic sensors. The IMUs are then used to determine the orientation of these sensors i.e. the GNSS and INS, LiDAR and cameras etc. are also integrated with INS and GNSS is integrated to compute the coordinates.
Principles of SLAM operation
The sensors collect information about the area being mapped and the movement of the device. The LiDAR system measures the distance to objects and creates point cloud. The camera provides visual information (i.e. images), which are then analyzed to highlight key features (such as corners, the contours and other landmarks). The localization (SLAM) involves determining the current position and orientation of a device in space based on sensor data. Algorithms such as the Kalman filter or particle filter are often used to minimize errors and smooth out noise in sensor data. As the device moves, the system builds a map of the surrounding space using the sensor data.
Advantages of using SLAM
SLAM enjoys complete autonomy due to its ability to work in almost any or all conditions. It can work in tunnels, cities, forests, etc. where is limited or complete absence of a GNSS signal. One of the main advantages of mobile mapping is its ability to collect large-scale data efficiently and in real time. Unlike traditional mapping methods that might require stationary equipment or manual data gathering, mobile mapping systems can rapidly cover vast areas while ensuring high precision. This mobility and efficiency make it particularly useful for projects such as road surveys, utility inspections, and autonomous vehicle development.
Disadvantages of using SLAM
In most cases, while using SLAM, there is no georeferencing of data, i.e., the map is local. Therefore, the ability to work is limited by weather conditions. SLAM also requires large computing power to process data in real time, if LiDAR or high-resolution cameras are used. The collected data also requires large storage space. The cost of processing software is also another bottleneck. The software is costly just as the harware is.
Therefore, SLAM can be computationally intensive, requiring significant processing power and memory, especially in real-time applications. As the environment becomes more complex, the SLAM algorithms can struggle with accuracy and consistency due to factors such as sensor noise, limited feature recognition or dynamic changes in the environment. Additionally, SLAM can be less reliable in large-scale projects or poorly structured environments where feature matching becomes challenging leading to drift or errors in the generated map. Additionally, the reliance on high-quality sensors and calibration can increase the cost and complexity of the system.

Integration of Mobile Mapping with AI
In mobile mapping, the computer vision Artificial Intelligence (AI) excels in automating the extraction and recognition of features from images or video data collected during mapping. As well, new deep learning-based AI algorithms analyzes the MM images to extract inventory and create accurate digital maps.
This data can be used to create accurate 3D maps and models, providing detailed insights into the landscape, infrastructure, and urban areas. When combined with AI, these systems can automate the interpretation of complex data, enabling faster and more precise analysis of environments.
AI technologies such as machine learning algorithms enhance mobile mapping by enabling automatic feature recognition, classification, and anomaly detection. For instance, AI can help identify specific objects like road signs, markings and damages; buildings, trees, or even detect potential hazards like potholes or construction zones.
This reduces the need for manual data processing and makes the overall system much more efficient. Additionally, AI can analyze temporal changes in mapped areas over time, detecting shifts in the environment such as new construction or natural disasters, which can be crucial for urban planning, disaster response, and environmental monitoring.
The fusion of mobile mapping with AI is already transforming industries such as transportation, urban planning, agriculture, and autonomous driving. Self-driving cars, for example, rely on real-time mapping data combined with AI to navigate and make decisions on the fly. Furthermore, urban planners use AI-powered mobile mapping systems to gather data for smart city projects thereby improving the infrastructure and public safety. The ongoing advancements in AI and mobile mapping are expected to continuously accelerate the efficiencies in many sectors hence offering even more accurate and actionable insights across various fields.
References: Inertial Labs
GIS training courses catalogue: Here ++ | E-mail address: [email protected] | WhatsApp No: +254 719 672 296
Ad: Explore the world with Expedia
Flewflew: AI solutions provider in Africa

OrbiCollect: Mobile mapping made easier!

NSE Stock Market: Buy & Sell Shares

AGM 6th Edition: Jan-Apr 2025