 In bathymetric survey, the principle of ranging is necessary in order to send some form of energy signal and measure the time duration for its reflection to arrive at the measuring equipment. In case of echo sounder, the signal cannot be electromagnetic, as there is heavy attenuation (reduction of effect) in water. It cannot be light because water is not transparent and there is no mirror-like reflecting surface at the seabed. Therefore, sound propagation is by setting up vibrations in the medium. Since water is virtually incompressible, so if vibrations of very small magnitude are set up they can travel great distances.
In bathymetric survey, the principle of ranging is necessary in order to send some form of energy signal and measure the time duration for its reflection to arrive at the measuring equipment. In case of echo sounder, the signal cannot be electromagnetic, as there is heavy attenuation (reduction of effect) in water. It cannot be light because water is not transparent and there is no mirror-like reflecting surface at the seabed. Therefore, sound propagation is by setting up vibrations in the medium. Since water is virtually incompressible, so if vibrations of very small magnitude are set up they can travel great distances.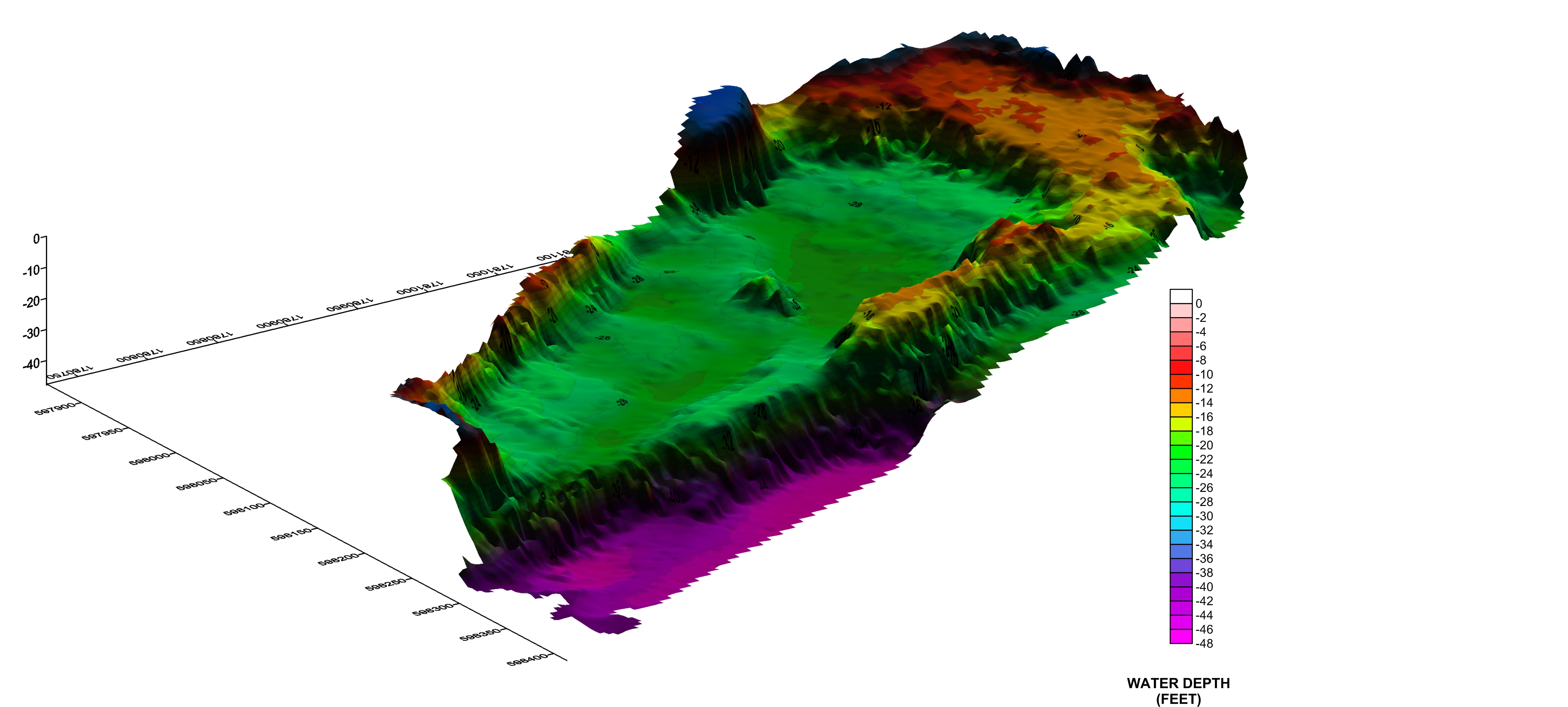{kind=link}
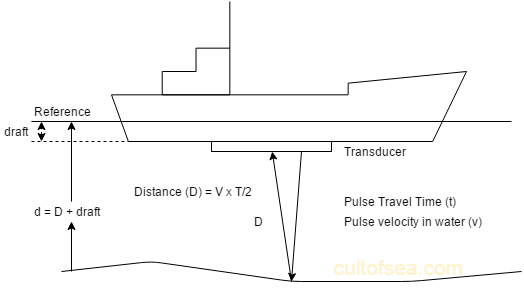
An echosounder, also known as a sonar depth finder, is a device used to measure the depth of water by transmitting sound waves and measuring the time it takes for the sound to bounce back. It works on the principle of transmitting sound waves from ship’s or boat bottom and then measuring the time taken for the echo to be returned from seabed or other underwater objects. If the velocity of sound in water is known the time will be proportional to the distance travelled. This technology is widely used in hydrography, oceanography, and marine navigation.
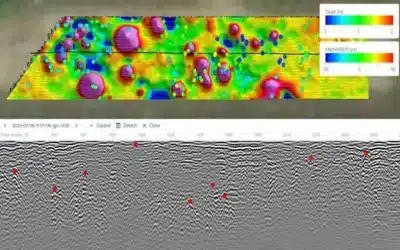
Working: The acoustic pulses of very short duration are transmitted vertically at the rate of 5 to 600 pulses per minute having a beam width of 12 to 25°. These pulses strike the seabed and get reflected back towards the receiving transducer as echoes. These received echoes are converted into electrical signals by the receiving transducer and after passing through the different stages of the receiver, the current is supplied to the stylus which bums out the coating of the thin layer of aluminium powder and produces a black mark on the paper indicating the depth of the seabed.
How an echosounder works
- Transducer: The echosounder consists of a transducer, which is a specialized underwater acoustic sensor. The transducer emits a short pulse of sound waves into the water.
- Sound Waves Propagation: These sound waves travel through the water until they encounter the seafloor or any underwater object. When the sound waves hit an object, they are reflected back towards the surface.
- Return Signal: The transducer then detects the returning sound waves, or echoes. The time taken for the sound waves to travel to the seafloor and back is measured.
- Depth Calculation: Using the known speed of sound in water, the echosounder calculates the depth of the water at the point where the sound waves hit an object and returned. The formula for computing depth is:
Depth = (Speed of sound × time) / 2
 Echosounders are crucial tools in mapping the ocean floor, conducting bathymetric surveys, and creating navigational charts. They are widely used in various industries, including marine research, fishing, environmental monitoring, and offshore oil and gas exploration.
Echosounders are crucial tools in mapping the ocean floor, conducting bathymetric surveys, and creating navigational charts. They are widely used in various industries, including marine research, fishing, environmental monitoring, and offshore oil and gas exploration.
There are different types of echosounders with varying frequencies, each suitable for different applications. High-frequency echosounders are more effective in shallow waters, while low-frequency ones are used for greater depths. Additionally, multibeam echosounders can provide detailed information about the underwater terrain by emitting multiple beams of sound waves simultaneously.
Single beam vs. Multibeam echosounder
 A Single Beam Echosounder (SBES) is a type of echosounder that uses a single acoustic beam to measure water depth. This type of echosounder is simple in design and operation, making it suitable for a variety of applications, particularly in shallow water environments. SBES offer significant cost savings compared to multibeam echosounder systems and are especially useful in very shallow water i.e. under 5-10m depth. Results from single beam echosounders are easier to interpret, far less time-consuming to edit, and the SBES equipment may be operated by less experienced personnel.
A Single Beam Echosounder (SBES) is a type of echosounder that uses a single acoustic beam to measure water depth. This type of echosounder is simple in design and operation, making it suitable for a variety of applications, particularly in shallow water environments. SBES offer significant cost savings compared to multibeam echosounder systems and are especially useful in very shallow water i.e. under 5-10m depth. Results from single beam echosounders are easier to interpret, far less time-consuming to edit, and the SBES equipment may be operated by less experienced personnel.
Single Beam echosounders are often mounted on boats or survey vessels and are towed through the water to collect depth data along a specific path. This type of echosounder is suitable for mapping the seabed and creating basic bathymetric charts. However, it is important to note that Single Beam Echosounders provide depth information only along a single line or track, which means that comprehensive mapping requires multiple passes or the use of other techniques.
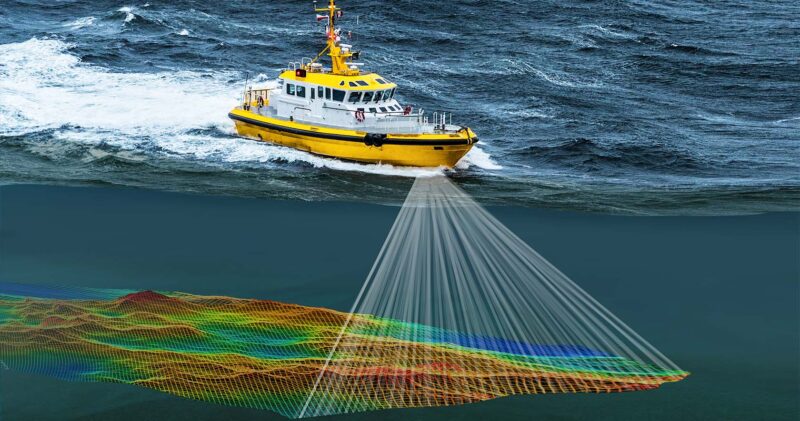
A Multibeam Echosounder (MBES) on the other hand, is a sophisticated underwater mapping device that uses multiple beams of sound to capture a wide swath of the seafloor simultaneously. Unlike Single Beam Echosounders that measure depth along a single track, Multibeam echosounders can generate detailed bathymetric maps over a broader area. Unlike other sonars, multibeam systems use beamforming (a technique used to improve the signal-to-noise ratio of received signals, eliminating undesirable interference sources) to extract directional information from the returning soundwaves, producing a swath of depth readings from a single ping.
Multibeam is able to acquire up to 512 separate soundings in each depth profile. This provides a resolution that by far exceeds what you find by use of a singlbeam echo-sounder. When surveying in 10 m of water the system will collect a sounding for every 7 cm across track (transverse to the sailing direction). Multibeam is therefore much more efficient compared to the single-beam, especially if you want to make a hydrographic survey with 100% seabed coverage.
Advantages and disadvantages of SBES and MBES
Advantages of Single Beam Echosounders include their simplicity, lower cost, and suitability for shallow water surveys. They are commonly used in activities such as hydrographic surveys, sediment transport studies, and environmental monitoring in coastal areas. While they are effective for certain applications, more advanced systems like Multibeam Echosounders are preferred for detailed bathymetric mapping over larger areas due to their ability to cover a wider swath with multiple beams simultaneously.
The advantage of Multibeam Echosounders lies in their ability to cover large swaths of the seafloor efficiently, providing high-resolution bathymetric data that is crucial for various marine and underwater studies. The main disadvantage of multibeam echosounder is that it’s costly to acquire it and may require additional training and expetise to operate it. Multibeam echosounders are widely used in various marine applications, including:
Errors of the Echo Sounder
- The velocity of propagation in water: The velocity of acoustic wave changes if temperature, salinity or pressure changes and since velocity is not correct, the depth recorded will be inaccurate.
- Stylus speed error: The stylus is rotating with a certain constant speed and the speed of the stylus that the time is taken for the stylus to travel from top to bottom is exactly equal to that for an acoustic pulse to travel twice the distance of the range selected. Due to the fluctuation in the voltage, the speed of the stylus motor changes hence the depth recorded Will be inaccurate. It should be checked periodically and adjusted as per the instruction is given in the manual.
- Multipath Echoes: The echo may be reflected a number of times between the keel and the seabed, thereby giving multiple depth marks on the record, in such case the first echo is the correct depth.
- Pythagoras error: This error is found when two transducers are used one for transmission and other for reception.
- Thermal and Density layer: The density of the water varies with temperature and salinity, which will tend to form different layers. It is possible for echoes to return from the surface of these layers and a faint line appears between zero and actual depth.
- Zero line adjustment error: If the zero adjustment is not correct, the depth recorded will not be correct.
A large source of error in hydrographic surveys using a single beam echosounder is an incorrect speed of sound used in the depth calculations. To remedy this, a bar check should be conducted before the survey commences. The bar check involves lowering a flat plate below the echo sounder transducer to several known depths below the surface and comparing the actual versus measured depth. As the bar is moved down, the sound velocity in the echo sounder is adjusted until the measured depth matches the actual depth i.e. calibration process.
Ad: Explore the world with Expedia
Flewflew: AI solutions provider in Africa

OrbiCollect: Mobile mapping made easier!

NSE Stock Market: Buy & Sell Shares